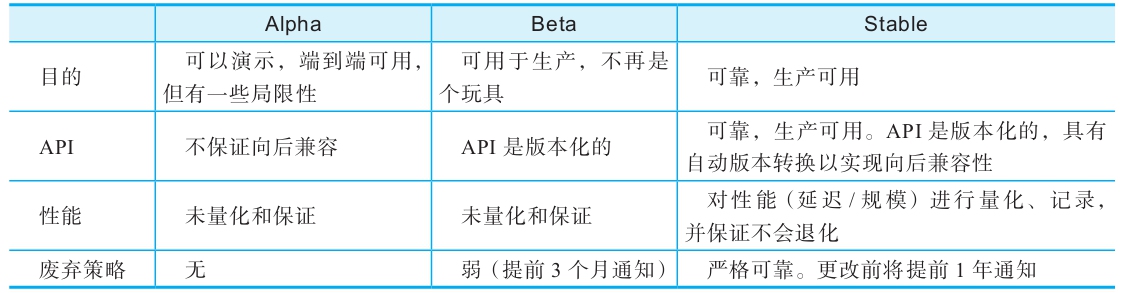
Istio社区一直在快速更新中,每个Istio功能模块的相对成熟度和支持级别也随之在不断地变化。社区对这些功能模块的不同发展阶段进行了定义,参见表9-1。
表9-1 Istio功能模块的不同发展阶段
不同的功能模块成熟度和发展阶段不尽相同,熟悉这些阶段进展情况,对于选择Istio的哪些功能模块应用到生产环境中非常有帮助。这些信息在每月Istio发布后会及时更新,读者可以及时从官方网站了解最新进展:https://istio.io/about/feature-stages/。
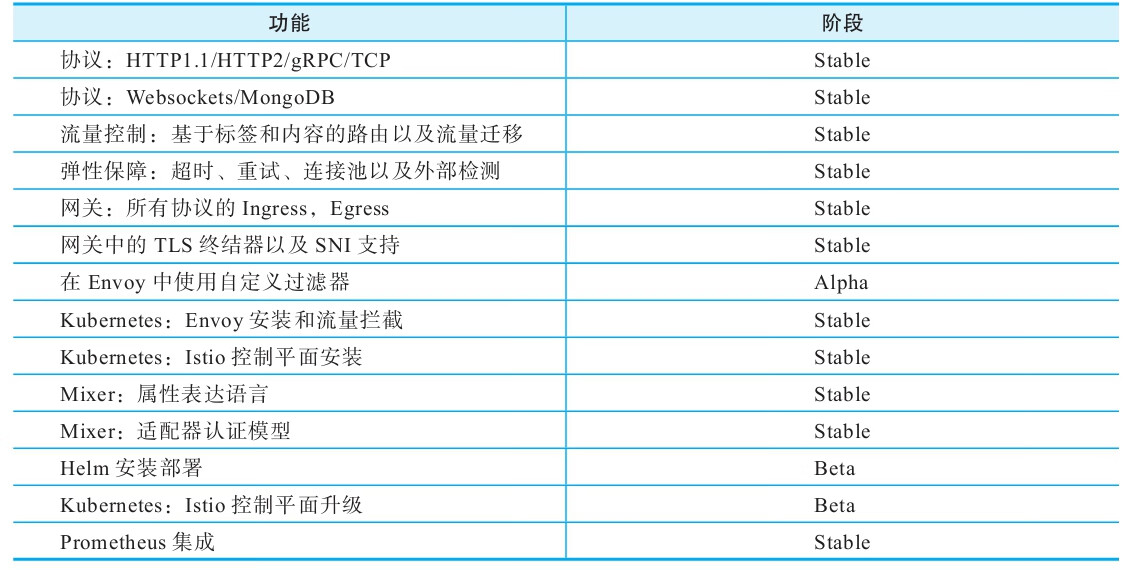
总体而言,Istio Pilot和Envoy相关的流量管理功能模块比较成熟,除了自定义Envoy Filter的支持处于Alpha状态外,其他功能模块都是Beta或者Stable。Istio 1.4中的具体状态摘录参见表9-2。
表9-2 Istio 1.4中的功能模块状态
1.Pilot的稳定性
Pilot负责Istio的流量控制功能,同时将Sidecar更新至最新的配置。Pilot启动以后,监听端口15010(gRPC)和8080(HTTP)。当应用的Sidecar(Envoy,Istio-Proxy)启动以后,它将会连接pilot.istio-system:15010,获取初始配置,并保持长连接。
Pilot会监听Kubernetes资源,只要检测到网格发生变化,就会将最新的配置通过gRPC连接推送到Sidecar上。
当Pilot停止以后,Pilot和Sidecar之间的gRPC连接被关闭,同时Sidecar会一直尝试重连。网络流量不会受Pilot停止的影响,因为所有的配置被推送过来以后,就会存储在Sidecar的内存中。网格中新的变更信息(例如新的pod、规则、服务等)不会继续到达Sidecar,因为Pilot不再监听这些变化并转发。当Pilot重新上线以后,Sidecar就会重新建立连接(一直尝试重连)并获取最新的网格配置。
2.Mixer的稳定性
Mixer Policy执行网络策略。Mixer在启动时读取配置,并监听Kubernetes的资源变化。一旦检测到新的配置,Mixer就会将其加载至内存中。Sidecar在每次请求服务应用时,检查(发起连接)Mixer Policy pod。
当Mixer Policy pod停止以后,所有到服务的请求会失败,并收到“503 UNAVAILABLE:
no healthy upstream”的错误,因为所有Sidecar无法连接到这些pod。
在Istio 1.1版本中新增了[global]配置(policyCheckfailOpen),允许“失败打开”策略,即当Mixer Policy pod无法响应时,所有的请求会成功,而不是报503错误。当Mixer停止后,我们在网格中执行的操作(例如新增规则、更新配置等)都不会对应用产生影响,直到Mixer重新启动。
Mixer Telemetry为Istio插件提供遥测信息。Sidecar什么时候调用Telemetry pod取决于两个因素:批量完成100次请求和请求时间超过1秒钟(默认配置),这两个条件只要有一个先满足就会执行该操作,这是为了避免对Telemetry pod造成过于频繁的调用。
当Telemetry pod停止以后,Sidecar记录一次失败信息(在pod标准错误输出里),并丢弃遥测信息。请求不会受到影响,正如Policy pod停止时一样。当Telemetry pod重新启动以后,就会继续从Sidecar收到遥测信息。
此外,Istio允许自定义控制平面的组件。例如,如果不需要Policy,你可以完全禁用Mixer Policy。Pilot、Mixer Policy和Mixer Telemetry在高可用部署场景工作得也很好,可以同时运行多副本。实际上,默认配置通过HorizontalPodAutoscaler允许启动1到5个pod。